皆様花言葉って聞いたことありますよね?
花言葉=人間の感情に何かしら訴えてくれるもの
と僕は思っています。そもそも花言葉なんて誰が考えたのでしょうかね?
花だって「何か言いたいわよ!呟かせてよ!」ってことなんでしょうかね?
アサガオの花言葉は「はかない恋」「固い絆」「愛情」だそうです。大変な花生を歩んでそうですね。
ウメの花言葉は「高潔」「忠実」「忍耐」なんともかっこいい。ウメの見え方も変わってきますよね?
最後に柿にも花言葉があるそうなので紹介させてください。
柿「広大な自然の中で私を永遠に眠らせて」
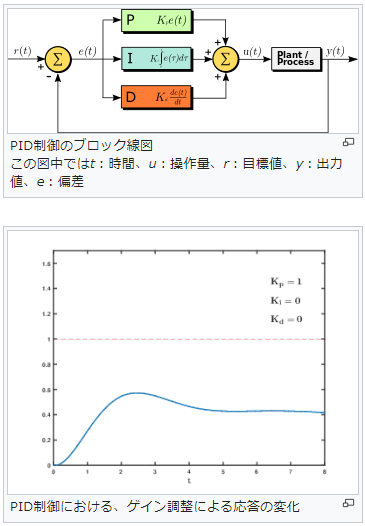
どうも僕です。今回はPID制御について解説していきたいと思います。
制御関係のお仕事をしていくと出会うことになると思うのですが、僕は大変苦労しました。そもそも何を言っているのかわからなかったからです。
結果をお伝えしますと、測定値を目標値に自動で近づけてくれるという考えでいいと思います。
各章で簡単ですが解説しましたので少しでもお力になれればなと思います。
今回もよろしくお願い致します。
PID設定について
どの機器にも最近は「オートチューニング※1」機能があるので、始めはそちらを使用したほうが手っ取り早いと思います。
オートチューニング以降は、人が目視で測定値を確認しながら目標値になるように「PID」のパラメータを微調整していきます。
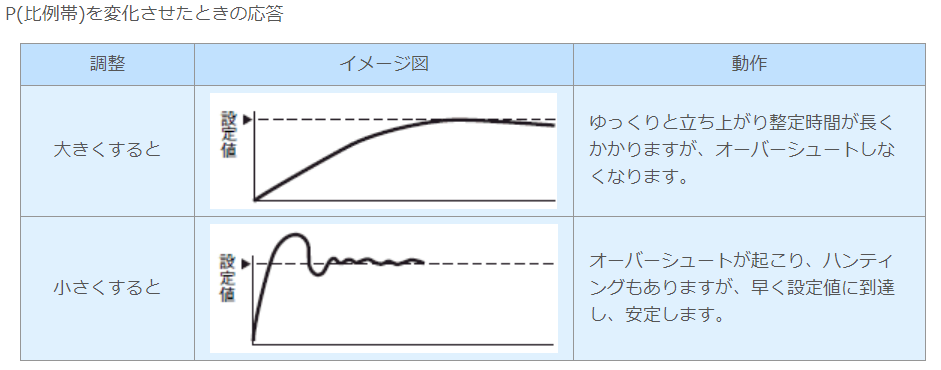
P(比例制御)
こちらを簡単に説明すると
「測定値を目標値に大雑把に近づけてくれるもの」です。
「オートチューニング」後、始めに調整する箇所は「P(比例制御)」を触ってみてください。
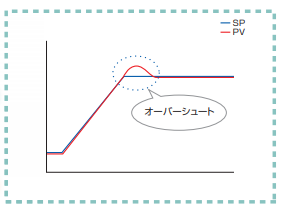
こちらは「オーバーシュート※2」していたり、「アンダーシュート※3」している場合に、「P(比例制御)」の数値を触ることで一番わかりやすく測定値に反映される。
数値を大きくした場合には、「ゆっくりと立ち上がり出力が安定するまで時間がかかりますが、オーバーシュートしにくくなります。」
また数値を小さくした場合は、「オーバーシュートが起きやすくなり、ハンティング※4もあるが、設定値に早く到達し、安定します。」
※1 PID制御の設定を行う際、最適定数を自動算出してくれる機能
※2 測定値が目標値を一時的に上回ってしまうこと
※3 測定値が目標値を一時的に下回ってしまうこと
※4 オーバーシュートとアンダーシュートを繰り返すこと
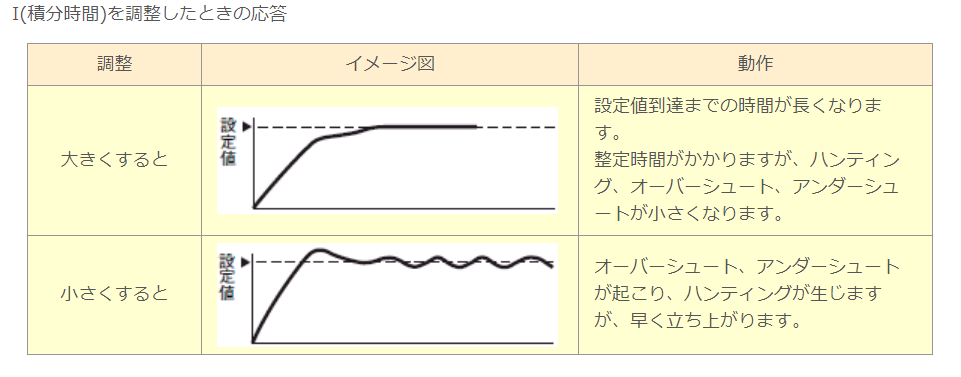
I(積分制御)
こちらを簡単に説明すると
「測定値を目標値に近づけるように微調整してくれるもの」です。
オートチューニング後にこちらをあまり触ることはないと思いますが、「P(比例制御)」だけではなかなか安定しない場合はこちらも触ると良いです。
こちらの「I(積分制御)」では、「P(比例制御)」では限界であった数値の誤差を近づけてくれるものになります。
数値を大きくした場合には、設定値到達までの時間は長くなります。出力が安定するまで時間はかかりますが、ハンティング、オーバーシュート、アンダーシュートが小さくなります。」
また小さくした場合には、オーバーシュートやアンダーシュートが起こり、ハンティングが生じますが、早く立ち上がるようになります。
※1 PID制御の設定を行う際、最適定数を自動算出してくれる機能
※2 測定値が目標値を一時的に上回ってしまうこと
※3 測定値が目標値を一時的に下回ってしまうこと
※4 オーバーシュートとアンダーシュートを繰り返すこと
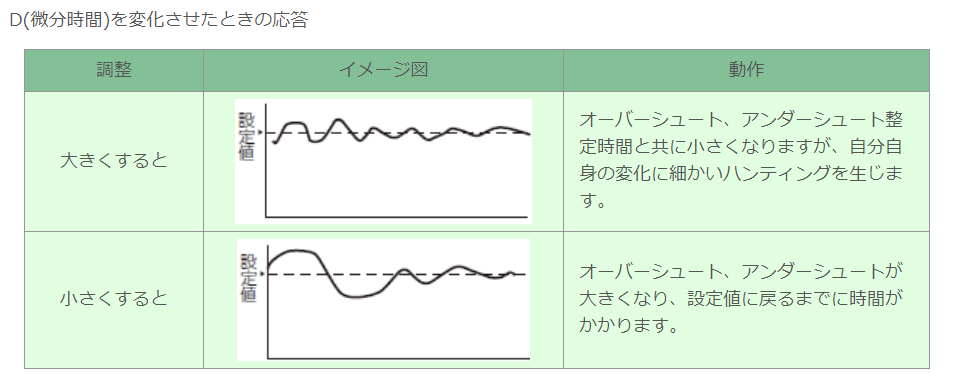
D(微分制御)
こちらを簡単に説明すると
「制御を乱す要因があったときに素早く修正してくれるもの」です。
「P(比例制御)」と「I(積分制御)」では専門分野ではない、素早い修正を「D(微分制御)」がおこなってくれます。
数値を大きくした場合には、オーバーシュート、アンダーシュート出力安定時間と共に小さくなっていくのですが、細かいハンティングを繰り返してしまいます。
また小さくした場合には、オーバーシュート、アンダーシュートが大きくなり、設定値に戻るまでに時間がかかるようになってしまいます。
※1 PID制御の設定を行う際、最適定数を自動算出してくれる機能
※2 測定値が目標値を一時的に上回ってしまうこと
※3 測定値が目標値を一時的に下回ってしまうこと
※4 オーバーシュートとアンダーシュートを繰り返すこと
オーバーシュート時の対応方法
オーバーシュートを起こしてしまっては困る時は、制御応答が遅くなってしまってもいいので、「I(積分時間)」を増加することで、「ハンティング」や「オーバーシュート」「アンダーシュート」が小さくなります。
しかし、設定値になるまでの時間はどうしても遅くなってしまうのがネック。制御内容にもよりますが、基本的にオーバーシュートだと困ることが多いと思いますので、制御応答が悪くなるのも致し方ないと思われます。
※1 PID制御の設定を行う際、最適定数を自動算出してくれる機能
※2 測定値が目標値を一時的に上回ってしまうこと
※3 測定値が目標値を一時的に下回ってしまうこと
※4 オーバーシュートとアンダーシュートを繰り返すこと
まとめ

どうだったでしょうか?
自分は始めPID制御をあまり理解せずに現場に行ってしまい痛い目にあいました。本当にもう勘弁です。
これからPIDを使用して制御されるかたもこれだけは覚えておいてほしいです。
測定値を目標値に合わせる制御とだけ覚えておいてください。
今回もありがとうございました。
良かったら他のブロガー様の記事もご覧ください。
![]()
![]()